電動(dòng)汽車(chē)資源網(wǎng)? ?
 ?
?
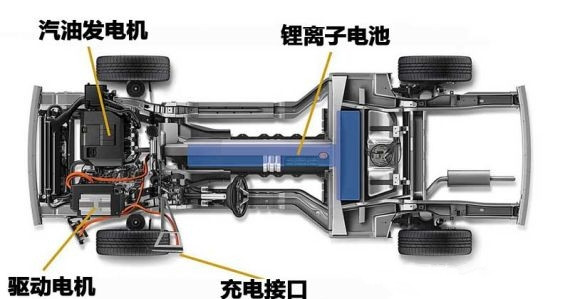
近幾十年來(lái),資源短缺和環(huán)境保護(hù)成為世界汽車(chē)工業(yè)面臨的兩大挑戰(zhàn)。石油資源短缺��,汽車(chē)尾氣對(duì)大氣的污染日趨嚴(yán)重,因此,各國(guó)汽車(chē)工業(yè)都加大了研究和開(kāi)發(fā)其它燃料汽車(chē)和電動(dòng)汽車(chē)的力度。
1? 混合動(dòng)力電動(dòng)汽車(chē)系統(tǒng)結(jié)構(gòu)
圖1為串聯(lián)式混合動(dòng)力系統(tǒng)拓?fù)浣Y(jié)構(gòu)圖���,整個(gè)混合動(dòng)力系統(tǒng)采用串聯(lián)式結(jié)構(gòu)����,主要由能源供給系統(tǒng)�����、電氣驅(qū)動(dòng)系統(tǒng)和機(jī)械傳動(dòng)系統(tǒng)三大部分構(gòu)成�����。能源供給系統(tǒng)由動(dòng)力電池組�����、發(fā)動(dòng)機(jī)-發(fā)電機(jī)機(jī)組組成�����;電氣驅(qū)動(dòng)系統(tǒng)由逆變器和電動(dòng)機(jī)組成��;機(jī)械傳動(dòng)系統(tǒng)將電動(dòng)機(jī)的機(jī)械輸出通過(guò)減速器送給驅(qū)動(dòng)橋����。整車(chē)系統(tǒng)采用can總線(xiàn)傳輸信息和命令,通訊介質(zhì)采用屏蔽雙絞線(xiàn)����。
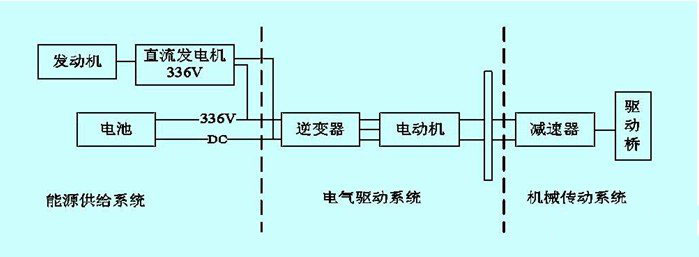
圖1 串聯(lián)式混合動(dòng)力系統(tǒng)拓?fù)浣Y(jié)構(gòu)圖
2 電機(jī)驅(qū)動(dòng)系統(tǒng)主電路結(jié)構(gòu)
2.1 主回路元件選擇
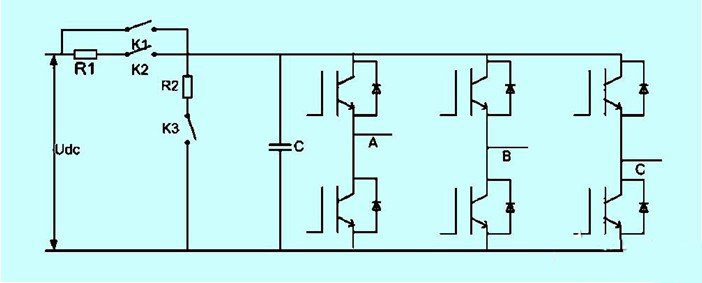
圖2 驅(qū)動(dòng)系統(tǒng)主回路電路圖
電機(jī)驅(qū)動(dòng)系統(tǒng)主回路原理如圖2所示,采用三相橋式逆變器���,根據(jù)牽引電機(jī)的參數(shù):額定功率50kw; 額定電流167a; 額定電壓240v;額定頻率200hz; 峰值頻率400hz����。功率器件可選600v/600a,開(kāi)關(guān)頻率10khz�����。
直流側(cè)支撐電容采用4個(gè)3300μf的電解電容并聯(lián)而成�,并聯(lián)在高壓直流母線(xiàn)兩端。由于直流側(cè)電壓udc=336v,所以支撐電容的耐壓等級(jí)應(yīng)高于336v,取450v��。
3? 控制電路
3.1 驅(qū)動(dòng)系統(tǒng)控制部分設(shè)計(jì)
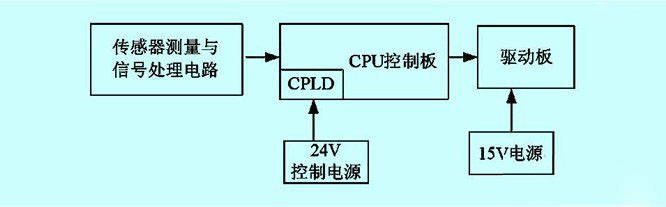
圖3 電機(jī)驅(qū)動(dòng)系統(tǒng)控制框圖
圖3為電機(jī)驅(qū)動(dòng)系統(tǒng)控制框圖�,它由傳感器測(cè)量與信號(hào)處理電路、控制板以及驅(qū)動(dòng)板等組成��。
電機(jī)控制電路分為電機(jī)電壓控制電路 ( 功率放大電路和 H 型雙極驅(qū)動(dòng)電路 ) 和 P W M 脈寬調(diào)制電路 �。抗干擾電路和過(guò) �����、 欠電壓檢測(cè)與保護(hù)電路已分別嵌入到了電機(jī)電壓控制電路和 P W M 脈寬調(diào)制電路兩大模塊內(nèi)。
P WM脈寬調(diào)制電路
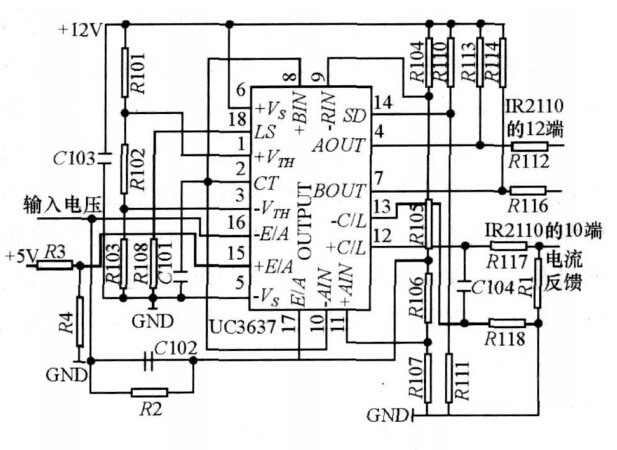
圖 4 P W M脈寬調(diào)制電路原理圖
設(shè)計(jì)依據(jù)如下 : U C 3 637 的控制電壓 ( 16 端 ) 在± 5V 變化時(shí) , 經(jīng) U C 3 637 內(nèi)部比例放大器處理后的電壓( 即引腳 9���、1 1兩端 ) 在 2 ~ 8V 之間變化且線(xiàn)性較好���。
3. 2 H 型雙極功率電路
H 型雙極功率電路原理圖如圖 5 所示 。它由 4個(gè)大功率管 V T 1 ~ V T 4 和 2 個(gè)新型雙極續(xù)流二極管D V 1��、D V 2 構(gòu)成�。
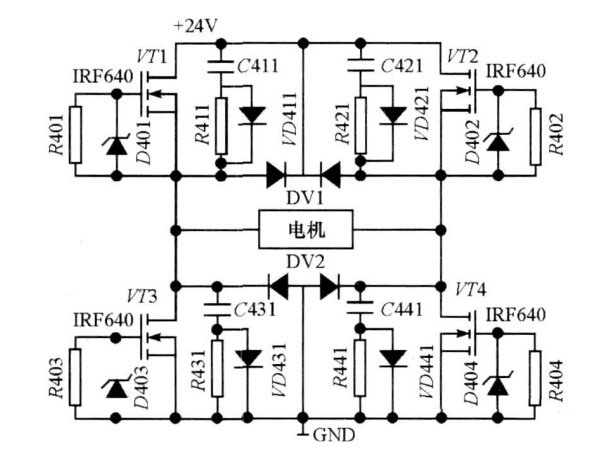
圖 5? H型雙極功率電路原理圖
3. 3 I R 21 10功率放大電路設(shè)計(jì)
依據(jù)大功率管 I R F 6 40容量較小 , 承受反壓能力較低的優(yōu)點(diǎn) , 采用 4 個(gè)大功率管作為功率驅(qū)動(dòng)電路開(kāi)關(guān)元件,同時(shí)用 2 個(gè) I R 21 10作為基極驅(qū)動(dòng)器對(duì)稱(chēng)地驅(qū)動(dòng)每側(cè)大功率管 I R F 6 40, 如圖 6 所示���。圖 6 是左側(cè) I R 2110 功率放大電路原理圖����。
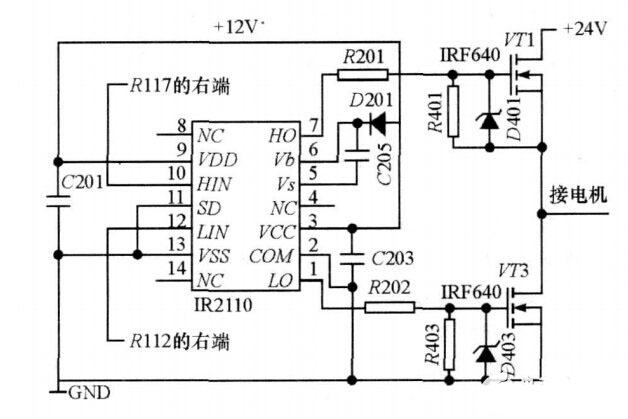
圖 6 左側(cè) I R 211 0 功率放大電路原理圖
I R 2110 功率放大電路主要由電容 C 205 和二極管 D 201 構(gòu)成 的自舉 電路 來(lái)實(shí)現(xiàn) 功率 驅(qū)動(dòng) ����。因此I R 2110 功率放大電路參數(shù)設(shè)計(jì)重點(diǎn)是自舉電容和自舉二極管的選取。
4? 電機(jī)的工作原理
控制電路性能可通過(guò)檢測(cè)電機(jī)的性能好壞來(lái)評(píng)價(jià) ����。電機(jī)的性能試驗(yàn)通過(guò)混合動(dòng)力電動(dòng)汽車(chē)系統(tǒng)來(lái)實(shí)現(xiàn) , 如圖 7中的虛線(xiàn)框所示 �����。 混合動(dòng)力電動(dòng)汽車(chē)系統(tǒng)控制方案為 : 和電機(jī)控制電壓相對(duì)應(yīng)的轉(zhuǎn)速 n 1與轉(zhuǎn)速傳感器反饋轉(zhuǎn)速 n 2 之差的電壓信號(hào) , 經(jīng) P I D外環(huán)控制器后與角位移傳感器反饋的角位移信號(hào)合成且經(jīng)內(nèi)環(huán) P I 控制器后形成控制電壓 , 來(lái)控制電機(jī)轉(zhuǎn)動(dòng)某個(gè)角度 θ , 最后經(jīng)發(fā)動(dòng)機(jī)輸出轉(zhuǎn)速 n。
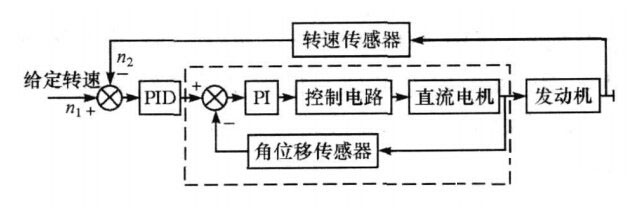
圖 7? 混合動(dòng)力電動(dòng)汽車(chē)系統(tǒng)控制方案圖